
Планар, режим работы по температуре.. Официальный дилер
Как воздушный отопитель работает по температуре?
Многие, обращающиеся в нашу компанию, часто спрашивают: «А может ли Планар поддерживать нужную температуру в салоне, в фургоне ?». Рассмотрим более детально этот вопрос.
Каждый выпускаемый сегодня Планар изначально оборудован датчиком температуры, который установлен на блоке управления отопителя (мозги Планар). Смысл в том, что температура воздуха, проходящего через корпус отопителя, регистрируется блоком управления. Управляющая программа постоянно отслеживает эти данные, когда заданная и фактическая температуры сравниваются, блок дает команду на прекращение подачи топлива в камеру сгорания и переход в режим вентиляции салона до тех пор, пока снова не появится разница температур в 5-6 °C. Цикл повторяется снова и снова на всем протяжении работы автономного воздушного отопителя. Выключить отопитель можно в любой момент вручную.
Что нужно чтобы реализовать эту функцию режима «по температуре»?
К большому сожалению, стандартная комплектация воздушных отопителей Планар любой модели не предусматривает наличия опций климат-контроля и работа предполагается только в режиме «по мощности». Поэтому обычно пользователям этих автономок приходится докупать отдельно некоторые комплектующие. Рассмотрим их более подробно, будем исходить из того что Ваш новый воздушный отопитель Планар имеет обычную комплектацию с механическим пультом управления ПУ-5.
Поэтому обычно пользователям этих автономок приходится докупать отдельно некоторые комплектующие. Рассмотрим их более подробно, будем исходить из того что Ваш новый воздушный отопитель Планар имеет обычную комплектацию с механическим пультом управления ПУ-5.
- Самым дешевым вариантом выступает покупка выносного датчика температуры, он применим ко всем моделям Планар. В этом случае он подключается в свободный выход отопителя и пока он подключен, Планар будет работать всегда в режиме по температуре. Управление желаемой температурой воздуха происходит вращением регулятора. При повороте изменяет от 1°С до 30°С. Хоть этот пульт и механический, но тем не менее он не является аналоговым, внутри установлен микроконтроллер, который посылает именно цифровые сигналы на блок управления ПЛАНАР.
2. Замена стандартного на электронный пульт ПУ-22. При использовании этого органа управления появляется возможность выбора датчика, по которому будет осуществляться поддержка температуры в диапазоне от 1°С до 30°С. Важно знать, что режим по температуре настраивается до запуска отопителя!
При использовании этого органа управления появляется возможность выбора датчика, по которому будет осуществляться поддержка температуры в диапазоне от 1°С до 30°С. Важно знать, что режим по температуре настраивается до запуска отопителя!
Если просто заменить, то на выбор доступно 2 датчика. Один в отопителе на блоке, другой непосредственно в самом пульте. Также стоит отметить, что при подключении дополнительно выносного датчика, как в первом случае, этот датчик тоже станет доступным на пульте.
Небольшое замечание: На самом деле, работа по датчику в пульте не совсем точная, т.к. данные имеют довольно высокую погрешность. Поэтому рекомендовано для получения «правильного» климата в салоне использовать датчик находящийся именно в отопителе.
3. Замена на новый пульт управления ПУ 27М. Красивый внешний вид, интуитивно понятное пользование и удобная индикация на LCD-дисплее.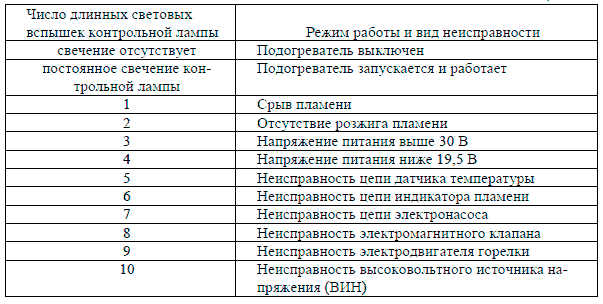 Это устройство по функциям сравнимо с пультом ПУ-22, но есть приятное дополнение — таймер. С появление этого пульта, пользователь может настроить время запуска отопителя. Функция безусловно покажется удобной многим автолюбителям, ведь теперь не придется ждать прогрева салона.
Это устройство по функциям сравнимо с пультом ПУ-22, но есть приятное дополнение — таймер. С появление этого пульта, пользователь может настроить время запуска отопителя. Функция безусловно покажется удобной многим автолюбителям, ведь теперь не придется ждать прогрева салона.
Важно знать! При включении отопителя Планар с таймера цикл работы будет длиться 2 часа. После чего обогрев будет остановлен, отопитель выйдет в продувку до полного отключения.
Теплостар. Автономка. ПЖД. Предпусковой подогреватель двигателя, автоподогреватели, воздушные отопители, автомобильные подогреватели.
НАГНЕТАТЕЛЬ ВОЗДУХА
НА НОВЫЙ!
НАГНЕТАТЕЛЬ ВОЗДУХА
НА НОВЫЙ!
Фильтры
Категории продуктов
- Воздушные отопители
- Жидкостные подогреватели
- Аксессуары
- Обогреватели воздушные ТЕРММИКС
Типы документаций
- Руководства по эксплуатации
- Руководства по установке
- Руководства по ремонту
- Сертификаты
- Каталоги запчастей
- Программное обеспечение
Локализация
- EN
- SE
- RU
- PL
- NO
- NL
- IT
- FR
- FI
- ES
- DE
- CZ
- DK
БИНАР 5S
Руководства по установке
ru Инструкция по монтажу
Руководства по ремонту
ru Руководство по ремонту
Сертификаты
ru Сертификат_БИНАР_5S_ЕАС_ТР_ТС_018_2011 ru Сертификат 122RРуководства по эксплуатации
ru Подогреватель Бинар 5S ru Пульт управления ПУ-20 ru Пульт управления ПУ-27 ru Подогреватель Бинар 5S NEXT (2021)
Каталоги запчастей
ru Каталог запчастей BINAR 5 S ru Каталог запчастей BINAR 5 S NEXT (2021) ru Каталог запчастей BINAR 5 S NEXT (2022)
14TC Мини
Руководства по эксплуатации
ru Подогреватель 14ТС мини ru Подогреватель 14ТС мини MAN
Сертификаты
ru Сертификат 122R ru Сертификат ТС ЕАС
Каталоги запчастей
 2016)
ru
Каталог деталей и сборочных единиц (КДС) сентябрь 2020
ru
Каталог деталей (КАМАЗ К-5)
2016)
ru
Каталог деталей и сборочных единиц (КДС) сентябрь 2020
ru
Каталог деталей (КАМАЗ К-5)BINAR 5 COMPACT
Сертификаты
ru Сертификат 122R(E2) ru Сертификат 122R(E8)
Руководства по эксплуатации
ru Подогреватель BINAR 5 COMPACT
Каталоги запчастей
ru Каталог запчастей BINAR 5 COMPACT
Руководства по ремонту
ru Руководство по ремонту
ПЛАНАР 2Д
Руководства по эксплуатации
ru Отопители ПЛАНАР серии S ru Пульт управления ПУ-5 ru Пульт управления ПУ-27 ru Пульты управления ПУ-10М и ПУ-22
Руководства по установке
ru Руководство по установке
Руководства по ремонту
ru Руководство по монтажу отопителей ПЛАНАР ru Руководство по ремонту отопителей ПЛАНАР 2
Сертификаты
ru Сертификат 122R ru Сертификат_отопители_ЕАС_ТР_ТС_018_2011
Каталоги запчастей
ru Каталог запчастей
ПЛАНАР 44Д
Руководства по эксплуатации
ru Отопители ПЛАНАР серии S
Руководства по ремонту
ru Руководство по ремонту отопителей ПЛАНАР (2015г) ru Руководство по ремонту отопителей ПЛАНАР (2016г)
Сертификаты
ru Сертификат 122R ru Сертификат 10 R ru Сертификат_отопители_ЕАС_ТР_ТС_018_2011
Руководства по установке
ru Руководство по установке
Каталоги запчастей
ru Каталог запчастей (июнь 2019) ru Каталог запчастей (март 2019) ru Каталог запчастей (КАМАЗ К-5)
ПЛАНАР 9Д
Руководства по эксплуатации
ru Отопитель ПЛАНАР 9Д
Руководства по установке
Сертификаты
ru Сертификат 122_PLANAR-9D ru Сертификат_отопители_ЕАС_ТР_ТС_018_2011
Каталоги запчастей
ru Каталог запчастей
Пульт управления ПУ 11М, сб.
 2745
2745Руководства по эксплуатации
ru Руководство по эксплуатации ПУ-11 и ПУ-11М
Пульт управления ПУ 11М, сб. 2740
Руководства по эксплуатации
ru Руководство по эксплуатации ПУ-11 и ПУ-11М
Модем SIMCOM
Руководства по эксплуатации
ru Модем SIMCOM
Пульт управления ПУ 20, сб. 3170
Руководства по эксплуатации
ru Руководства по эксплуатации ПУ-20
Пульт управления ПУ 27, сб. 4720 , (сб.3600)
Руководства по эксплуатации
ru Руководство по эксплуатации ПУ -27
Пульт управления ПУ 5, сб. 3520 (сб.3765)
Руководства по эксплуатации
ru Руководство по эксплуатации ПУ -5
ПЛАНАР 8 ДМ
Руководства по эксплуатации
ru Отопители ПЛАНАР серии S
Руководства по установке
ru Руководство по установке
Руководства по ремонту
ru Руководство по ремонту отопителей ПЛАНАР
Сертификаты
ru Сертификат_отопители_ЕАС_ТР_ТС_018_2011
Каталоги запчастей
ru Каталог запчастей
Инструкции и описание вспомогательных устройств
Руководства по эксплуатации
ru Адаптер RS 232 ru Адаптер RS 232 (СХЕМА) ru Адаптер USB ru Устройство подкачки топлива УПТ-4( С КОЛБОЙ) ru Описание проверочного стенда ru Устройство подкачки топлива УПТ-1
Адаптер USB сб.
 2135
2135Программное обеспечение
en Autoterm Test v1_11
АПЖ-30Д-24-GP-АВТ
Каталоги запчастей
ru Каталог запчастей АПЖ 30Д-24
Пульт управления ПУ 22, сб. 3340.
Руководства по эксплуатации
ru Руководство по эксплуатации ПУ-10М и ПУ-22
ПЛАНАР 4ДМ2
Сертификаты
ru Сертификат 122 R ru Сертификат_отопители_ЕАС_ТР_ТС_018_2011
Руководства по эксплуатации
ru Отопители ПЛАНАР серии S ru Пульт управления ПУ-27 ru Пульт управления ПУ-5 ru Пульты управления ПУ-10М и ПУ-22
Руководства по установке
en Руководство по установке
Руководства по ремонту
en Руководство по ремонту отопителей ПЛАНАР
Каталоги запчастей
ru
Каталог запчастей ПЛАНАР 4ДМ2_(2016г. )
ru
Каталог запчастей ПЛАНАР 4ДМ2_(2018г.)
)
ru
Каталог запчастей ПЛАНАР 4ДМ2_(2018г.)
14ТС-10
Сертификаты
ru Сертификат ТС_ЕАС ru Сертификат 122 R
Руководства по эксплуатации
ru Подогреватель 14ТС-10-(12/24) С ru Подогреватель 14ТС-10-24 C NEO ru Подогреватель 14ТС-10-Е4С (УРАЛАЗ) ru Подогреватель 14ТС-10-24-ВЛЖ (ВОЛЖАНИН) ru Подогреватель 14ТС-10-С (КАМАЗ) ru Подогреватель 14ТС-10-GP (КАМАЗ) ru Подогреватель 14ТС-10-М4 (МАЗ) ru Подогреватель 14ТС-10-ТВЭК ru Подогреватель 14ТС-10-ТВЭК 2 ru Подогреватель 14ТС-10-М5 (МАЗ)
Руководства по ремонту
ru Руководство по ремонту
Каталоги запчастей
ru
Каталог запчастей 14ТС10
ru
Каталог запчастей 14ТС-10 сб. 5650 (10.06.2021)
ru
Каталог запчастей 14ТС-10-12 (ГАЗ)
5650 (10.06.2021)
ru
Каталог запчастей 14ТС-10-12 (ГАЗ)
ПРЕДПУСКОВОЙ ПОДОГРЕВАТЕЛЬ 30SP-24
Руководства по эксплуатации
ru Руководство по эксплуатации.
Руководства по ремонту
en Руководство по ремонту 30SP
Каталоги запчастей
en Каталог запчастей 30SP ru Каталог запчастей 30SP (Март_2022)
Сертификаты
ru Сертификат ТС_ЕАС
СПУТНИК-2Д
Каталоги запчастей
ru Каталог запчастей СПУТНИК 2Д
Руководства по эксплуатации
ru Отопитель СПУТНИК 2Д
Руководства по установке
ru Руководство по установке
Сертификаты
ru Сертификат_отопители_ЕАС_ТР_ТС_018_2011
15ТSG-24-C
Сертификаты
ru Сертификат 122 R ru Сертификат ТС_ЕАС
СПУТНИК-3Д
Каталоги запчастей
ru Каталог запасных частей для отопителей марки СПУТНИК-3Д
Сертификаты
ru Сертификат_отопители_ЕАС_ТР_ТС_018_2011
Руководства по эксплуатации
ru Отопитель СПУТНИК 3Д
Воздушный обогреватель ТЕРММИКС 15Д
Каталоги запчастей
ru Каталог запчастей ТЕРММИКС 15Д
Каталоги запчастей
ПЛАНАР 44Б
Руководства по эксплуатации
ru Cкачать
Каталоги запчастей
ru Каталог деталей и сборочных единиц
30TCG_
Каталоги запчастей
en 30ТСG-24-ВЛЖ en 30ТСG-24
БИНАР-10D
Руководства по эксплуатации
ru Подогреватель БИНАР 10D (декабрь 2021) ru Подогреватель БИНАР 10D (август 2022)
Сертификаты
ru Сертификат ТС_ЕАС
Каталоги запчастей
ru
Каталог запчастей БИНАР 10D (октябрь 2022г. )
)
Пульт управления ПУ-28 (PU-28RU)
Руководства по эксплуатации
ru Пульт управления ПУ-28
BINAR-5S-NEXT
Каталоги запчастей
ru Каталог запчастей BINAR 5 S_NEXT (2021) ru Каталог запчастей BINAR 5 S_NEXT (2022)
Достижение автономии — Aerospace America
Автор Адам Хадхази|Январь 2020 г.
Следуя по стопам автономных автомобилей, разработка беспилотных летательных аппаратов продолжается. Какими бы похожими ни были проблемы в некоторых отношениях, Адам Хадхази обнаружил, что авиаинженеры должны в значительной степени создавать свои собственные решения.
Еще во время Первой мировой войны запуск истребителя с помощью ручной опоры означал, что кто-то изо всех сил толкал винт вниз и отпрыгивал назад, опасаясь за свою жизнь. Сегодня пилот запускает F-35, просто нажимая кнопки. Первым пилотам приходилось перемещаться только по зрению, полагаясь на положение небесных объектов для поддержания курса. В наши дни навигационные системы, подключенные к GPS, автоматически ведут самолет отсюда туда.
Первым пилотам приходилось перемещаться только по зрению, полагаясь на положение небесных объектов для поддержания курса. В наши дни навигационные системы, подключенные к GPS, автоматически ведут самолет отсюда туда.
За последнее десятилетие эта технологическая тенденция от трудоемкого и ненадежного ручного управления к удобному автоматическому начала проникать в вызывающую удивление область автономии в мире автомобилей и самолетов. Благодаря автономии принятие решений и их выполнение перестают быть исключительной или даже частичной компетенцией людей-операторов; транспортные средства должны думать и действовать самостоятельно, обеспечивая безопасность пассажиров и окружающих.
Самоуправляемые автомобили являются наиболее очевидным проявлением тенденции «Ночных гонщиков» к умным автомобилям. Беспилотные автомобили активно исследуются и развиваются крупными технологическими компаниями, такими как Google и Uber, новаторскими производителями автомобилей, такими как Tesla, а также признанными титанами отрасли, включая Toyota и Ford. Автономные автомобили уже преодолели десятки миллионов километров в городах по всему миру. Большая часть этого километра была предназначена для тренировок, но автомобили также перевозили некоторых бесстрашных пассажиров, в то время как владельцы Tesla обычно позволяют своим автомобилям работать в «автопилоте», полуавтономном режиме, который с легкостью справляется с уличным вождением.
Автономные автомобили уже преодолели десятки миллионов километров в городах по всему миру. Большая часть этого километра была предназначена для тренировок, но автомобили также перевозили некоторых бесстрашных пассажиров, в то время как владельцы Tesla обычно позволяют своим автомобилям работать в «автопилоте», полуавтономном режиме, который с легкостью справляется с уличным вождением.
Далеко за этой кривой и с гораздо меньшей помпой также находятся в разработке автономные летательные аппараты. Лидеры авиационной отрасли, в том числе три крупнейших производителя Boeing, Airbus и Embraer, признают перспективы и, возможно, необходимость этой революции в авиаперевозках. Большинство текущих усилий сосредоточено на городской воздушной мобильности, небольших персональных аэротакси для городских условий с прицелом на полноценную автономию для обычных дальнемагистральных коммерческих рейсов.
В некоторых отношениях беспилотные самолеты основываются на достижениях, уже достигнутых разработчиками наземных транспортных средств, говорит Арне Стошек, который сам работал над автономными автомобилями до того, как стал руководителем проекта Wayfinder, инициативы по разработке программного и аппаратного обеспечения для автономных полетов в Airbus A3. инновационный центр в Силиконовой долине. «Мы наступаем на плечи гигантов, — говорит Стошек, — благодаря «огромным инвестициям, сделанным автомобильной промышленностью».
инновационный центр в Силиконовой долине. «Мы наступаем на плечи гигантов, — говорит Стошек, — благодаря «огромным инвестициям, сделанным автомобильной промышленностью».
Но, как отмечают он и другие, в ключевых аспектах самолетам придется идти своим путем, сталкиваясь с проблемами, уникальными для их воздушной оперативной среды. Решение этих задач определит, когда и когда автономные автомобили поднимутся в небо в заметном количестве — до, вместе или после того, как их беспилотные аналоги станут доминировать в городских пейзажах, как многие ожидают.
Давление на то, чтобы самостоятельные полеты стали жизнеспособными раньше, чем позже. Главный мотиватор: надвигающаяся нехватка пилотов, учитывая широко ожидаемое удвоение числа коммерческих авиалайнеров в течение следующих нескольких десятилетий. Марк Казин, генеральный директор A3, считает, что в ближайшие 20 лет потребуется обучить 600 000 пилотов, хотя «с момента создания коммерческой авиации мы обучили только 200 000 пилотов».
Ставки еще больше повышаются, поскольку последствия отказа для самолетов ужасно серьезны по сравнению с автомобилями.
«Между самолетами не существует такого понятия, как изгиб крыльев», — говорит Джек Лангелаан, изучающий автономные полеты в качестве адъюнкт-профессора аэрокосмической техники в Университете штата Пенсильвания. «У вас может быть незначительное столкновение двух автомобилей — никто не пострадает, ничего. Но если два самолета столкнутся в небе, они куда-то падают и, возможно, на прохожих, которые совершенно не вовлечены во всю ситуацию».
Беспилотный или самоходный?
На вопрос, что окажется в конечном итоге сложнее, разработка беспилотных автомобилей или самолетающих самолетов, исследователи возражают, указывая на амбивалентную природу вопроса. Излагая очевидное, автомобили работают в двухмерной среде, в то время как самолеты работают в трех измерениях. Скорость — еще одно ключевое отличие, по крайней мере, если принять во внимание крейсерскую скорость обычных самолетов примерно в 900 км/ч по сравнению со скоростью автомобилей более 100 км/ч на шоссе. Воздушные такси и дроны-доставщики с их винтовыми двигателями и малыми высотами и короткими рейсами будут работать со скоростью, более близкой к скорости автомобилей.
Воздушные такси и дроны-доставщики с их винтовыми двигателями и малыми высотами и короткими рейсами будут работать со скоростью, более близкой к скорости автомобилей.
Наконец, в отличие от автомобилей, у авиалайнеров не будет возможности резкого торможения или даже значительного замедления в случае препятствий; Предотвращение столкновения (читай: катастрофы) сводится к маневрам уклонения, которые должны сохранять летную годность.
«Подводя итог, — говорит Стошек, — большая разница в том, что это трехмерная задача, она практически в 10 раз быстрее, чем автомобили, и вы не можете остановиться, если что-то пойдет не так».
Видеть дорогу, видеть небо
Несмотря на то, что операционная среда сильно различается, оба типа автономных транспортных средств, наземные и воздушные, по-прежнему будут полагаться на концептуально одни и те же датчики — камеры, радары и лидары — для восприятия окружения в режиме реального времени. Оба типа транспортных средств будут передавать эти данные в системы искусственного интеллекта, которые, пройдя обучение с помощью так называемого машинного обучения, будут идентифицировать, характеризовать и оценивать внешние явления. Затем ИИ транспортных средств быстро примет решение и выполнит любые изменения скорости, направления и т. д., необходимые для безопасной и эффективной навигации из точки А в точку Б.
Затем ИИ транспортных средств быстро примет решение и выполнит любые изменения скорости, направления и т. д., необходимые для безопасной и эффективной навигации из точки А в точку Б.
Пока что похоже. Но опять же, разрозненные миры, в которых работают транспортные суда, потребуют индивидуальных решений.
По сравнению с автомобилями самолетам легче, так это тем, что небо представляет собой относительно большое открытое пространство, за исключением случаев, когда они находятся вблизи зон приземления и взлета. Другими летающими объектами со значительной скоростью и весом, которые могут представлять серьезную опасность при столкновении, являются другие летательные аппараты. Такие транспортные средства могут общаться друг с другом напрямую, чтобы поддерживать безопасную дистанцию. Самолеты также контролируются и координируются диспетчерской службой воздушного движения, которая сама в конечном итоге должна стать в значительной степени автономной, чтобы учитывать прогнозы большого количества воздушных такси и дронов в городах, отмечает Паримал Копардекар, эксперт в области автономии и управления воздушным пространством, главный исследователь. из проекта управления движением беспилотных авиационных систем, директор Научно-исследовательского института аэронавтики НАСА в Исследовательском центре Эймса в Калифорнии.
из проекта управления движением беспилотных авиационных систем, директор Научно-исследовательского института аэронавтики НАСА в Исследовательском центре Эймса в Калифорнии.
Автомобили, с другой стороны, должны иметь дело с дорогами на несколько порядков сложнее. Это особенно заметно в перегруженных городских кварталах, где множество близлежащих автомобилей переплетаются с бесчисленными пешеходами, велосипедистами, скейтбордистами, строительными знаками, временными барьерами, мусором, беспечными голубями, гуляющими по улице — и так далее.
Хуэй Пэн, профессор машиностроения в Мичиганском университете и директор Mcity, университетского исследовательского центра автоматизированных транспортных средств, отмечает, что, кроме других автомобилей, эти объекты не будут иметь никакой возможности общаться или координировать свои движения с собой. -вождение автомобилей. «Они не разговаривают с вами», — говорит Пэн, имея в виду, что автомобили должны быть чутко реагирующими и гибкими в навигации по их запутанным объектам аренам.
Осмысление мира
По словам Лангелаана, с точки зрения зрения и восприятия окружающей среды датчики уже очень продвинуты; соответствие или превышение зрительных возможностей человека, например, с плотностью пикселей, не является проблемой. Вместо этого самая большая проблема связана с искусственным интеллектом в отношении анализа, интерпретации и, в конечном итоге, осмысления потока данных, чтобы быстро принимать решения и безопасно летать.
«У вас может быть камера 4K с огромным количеством пикселей», — говорит Лангелаан. «Но вам нужно обработать каждый из этих пикселей, чтобы понять, что говорит вам камера. Это проблема получения данных с датчиков и превращения их в полезную информацию».
Трудности, связанные с обработкой данных, значительно усиливаются в нештатных ситуациях, когда объекты на проезжей части или в небе ведут себя не так, как ожидалось — часто из-за капризов и особенностей поведения человека-оператора. Например, автомобиль может выезжать со стоянки McDonald’s на въезд на проезжую часть. Водитель просто пытается лучше разглядеть дорогу, прежде чем пытаться въехать? Или водитель на самом деле уже выезжает на дорогу, поглощая картошку фри, совершенно не подозревая о другом транспортном средстве, которое уже находится на проезжей части? Водитель-человек может заметить, ест ли другой водитель или опустил голову, вероятно, глядя в телефон, и предположить, что этот другой водитель на самом деле опасно не обращает внимания. Самоуправляемые системы изо всех сил пытаются делать такие повседневные выводы. «Для робота было очень сложно понять, каковы человеческие намерения», — говорит Лангелаан.
Водитель просто пытается лучше разглядеть дорогу, прежде чем пытаться въехать? Или водитель на самом деле уже выезжает на дорогу, поглощая картошку фри, совершенно не подозревая о другом транспортном средстве, которое уже находится на проезжей части? Водитель-человек может заметить, ест ли другой водитель или опустил голову, вероятно, глядя в телефон, и предположить, что этот другой водитель на самом деле опасно не обращает внимания. Самоуправляемые системы изо всех сил пытаются делать такие повседневные выводы. «Для робота было очень сложно понять, каковы человеческие намерения», — говорит Лангелаан.
В небе частичным решением для измерения намерений может быть обучение искусственного интеллекта распознавать типы самолетов, а также их ориентацию, которые в совокупности предписывают ряд возможных физических действий. (Алгоритмы в беспилотных автомобилях могут делать это до некоторой степени, например, путем различения пешехода и велосипеда и создания прогнозов относительно путей и скоростей, которые каждый из них может пройти по сравнению с другим с точки зрения представления возможного опасность столкновения. ) Например, если определенный тип самолета с неподвижным крылом — будь то пилотируемый человеком или автономный — имеет определенный наклон, то он должен поворачиваться. Совершенно другой набор таких выводов применим к дронам с квадрокоптерами и аэротакси, учитывая их радикально отличающуюся аэродинамику, отмечает Лангелаан.
) Например, если определенный тип самолета с неподвижным крылом — будь то пилотируемый человеком или автономный — имеет определенный наклон, то он должен поворачиваться. Совершенно другой набор таких выводов применим к дронам с квадрокоптерами и аэротакси, учитывая их радикально отличающуюся аэродинамику, отмечает Лангелаан.
«Было бы здорово, если бы [автономные летательные аппараты] могли это делать», — говорит Лангелаан. «Люди делают это все время, если мы играем в бейсбол против фрисби. Вы знаете, что эта штука ведет себя совсем по-другому, и мы можем объяснить это, когда пойдём её ловить.
Человеческое преимущество
В этом последнем пункте Лангелаан указывает на критический недостаток всех автономных систем: тот факт, что все, что они делают, это либо ездят, либо летают. Им не хватает богатого жизненного опыта пилота-человека, который видел и взаимодействовал с бесчисленными объектами и явлениями за пределами типичной авиационной среды. Это широкое мировоззрение позволяет человеку обычно и быстро диагностировать аномалию, какой бы неожиданной или странной она ни была, и предпринимать соответствующие действия. Учитывайте посадки. «Если все хорошо, — говорит Копардекар из НАСА, — это не проблема» для автономных систем. Но что, если на взлетно-посадочной полосе есть объект? Люди могут оценивать уровень угрозы естественным образом, опираясь на свои обширные знания за пределами авиации. «Людям очень легко понять, что это всего лишь сухой лист, а не большой камень», — говорит Копардекар.
Учитывайте посадки. «Если все хорошо, — говорит Копардекар из НАСА, — это не проблема» для автономных систем. Но что, если на взлетно-посадочной полосе есть объект? Люди могут оценивать уровень угрозы естественным образом, опираясь на свои обширные знания за пределами авиации. «Людям очень легко понять, что это всего лишь сухой лист, а не большой камень», — говорит Копардекар.
Конечно, в большинстве случаев посадки — это рутинные дела — настолько, что уже сегодня они становятся все более автоматизированными. Программы автопилота могут приблизиться к земле и начать руление, когда в аэропорту есть так называемая CAT III ILS (система посадки по приборам). В этой системе приборы в аэропорту и на борту самолета взаимодействуют друг с другом. Аэропорт передает информацию от радиолокационных решеток взлетно-посадочной полосы для определения местоположения самолета, а радиоантенны курсового радиомаяка постоянно передают данные о боковых отклонениях самолета от желаемой осевой линии. Другой инструмент, антенна глиссады, измеряет вертикальное расстояние самолета от земли, чтобы самолет сохранял правильный угол снижения (обычно 3 градуса над горизонтом) для достижения намеченной точки приземления на взлетно-посадочной полосе. Тем не менее, по словам Харвеста Чжана, руководителя отдела программного обеспечения A3 Wayfinder, менее сотни аэропортов по всему миру — как правило, с плохой видимостью — рассчитывают на CAT III ILS.
Тем не менее, по словам Харвеста Чжана, руководителя отдела программного обеспечения A3 Wayfinder, менее сотни аэропортов по всему миру — как правило, с плохой видимостью — рассчитывают на CAT III ILS.
Стошек, Чжан и их коллеги стремятся «научить» самолеты выполнять посадку без подобных автоматизированных систем посадки. Одно из таких усилий связано с проектом Airbus ATTOL (автономное такси, взлет и посадка), в рамках которого испытательный самолет A320 был оснащен датчиками, исполнительными механизмами и компьютерами, которые будут использоваться в настоящем автономном самолете. Эти усилия являются результатом сотрудничества с вышеупомянутой программой Wayfinder, целью которой является разработка общего сертифицируемого набора программного и аппаратного обеспечения, которое будет масштабироваться для автономных летательных аппаратов, от аэротакси до гигантских самолетов.
Компьютерная система Wayfinder состоит из искусственной нейронной сети, которая использует так называемое глубокое обучение для понимания и выполнения запрограммированных задач. Говоря простым языком, это означает компьютерную систему, которая обучается так же, как человек, путем изучения примеров, сначала выявляя основные, общие элементы в примерах, а затем превращая эти элементы в понятия все более сложной сложности. Для взлетно-посадочных полос это означает сначала распознавание основных краев и цветов линий, а затем сбор этой информации, чтобы, например, отличить взлетно-посадочную полосу от окружающей местности. Примеры, представляемые такой компьютерной системе, включают не только настоящие взлетно-посадочные полосы, но и тысячи и тысячи изображений смоделированных взлетно-посадочных полос. На данный момент нейронная сеть может надежно идентифицировать взлетно-посадочные полосы на реальных изображениях на расстоянии в несколько километров и с обнадеживающей точностью, учитывая ранний характер исследований и разработок.
Говоря простым языком, это означает компьютерную систему, которая обучается так же, как человек, путем изучения примеров, сначала выявляя основные, общие элементы в примерах, а затем превращая эти элементы в понятия все более сложной сложности. Для взлетно-посадочных полос это означает сначала распознавание основных краев и цветов линий, а затем сбор этой информации, чтобы, например, отличить взлетно-посадочную полосу от окружающей местности. Примеры, представляемые такой компьютерной системе, включают не только настоящие взлетно-посадочные полосы, но и тысячи и тысячи изображений смоделированных взлетно-посадочных полос. На данный момент нейронная сеть может надежно идентифицировать взлетно-посадочные полосы на реальных изображениях на расстоянии в несколько километров и с обнадеживающей точностью, учитывая ранний характер исследований и разработок.
В какой-то степени это еще маленькие шаги для посадочной части автономного полета, но Стошек и другие указывают на то, как быстро продвигается разработка автономных автомобилей. «Пятнадцать лет назад мы бы сказали, что автономные автомобили — это безумие, — говорит Стошек. «Теперь это реальность. Каждый день, когда я еду на работу в Airbus в Силиконовой долине, я вижу несколько беспилотных автомобилей, которые едут вокруг меня».
«Пятнадцать лет назад мы бы сказали, что автономные автомобили — это безумие, — говорит Стошек. «Теперь это реальность. Каждый день, когда я еду на работу в Airbus в Силиконовой долине, я вижу несколько беспилотных автомобилей, которые едут вокруг меня».
Переход к полной автономности
Прежде чем перейти к полной автономии, Пэн из Мичиганского университета предупреждает о значительной пропасти, которую придется преодолевать как автомобилям, так и самолетам, и в которую оба типа транспортных средств в некотором роде тревожно погружаются. Короче говоря, частичная автономия — когда люди-операторы могут быть вынуждены внезапно вмешаться, если высокоавтоматизированная или автономная система не знает, как реагировать, — опасна. Пэн описывает это так: «Вы хотите, чтобы человек пришел и спас мир, когда что-то пойдет не так».
Проблема в том, что люди-операторы, скорее всего, мало чем занимались, возможно, в течение нескольких часов, кроме вежливого наблюдения за работой транспортных средств.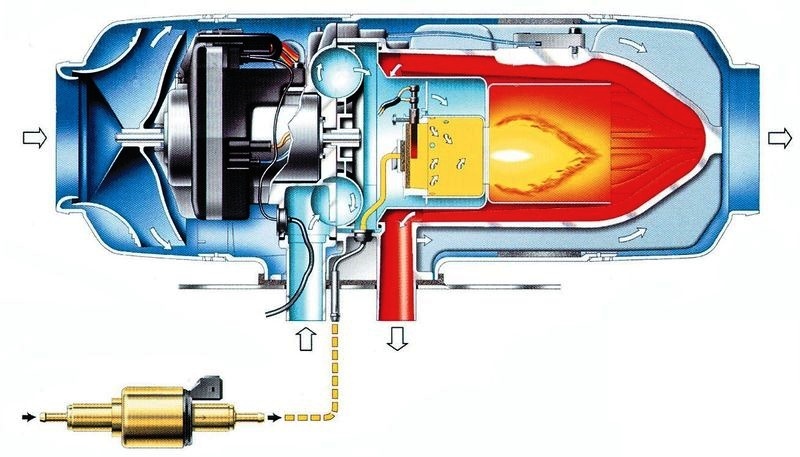 У человека будет отсутствовать необходимая ситуационная осведомленность, не говоря уже о достаточном количестве времени для принятия мер, если он попадет в аномальный, аварийный сценарий.
У человека будет отсутствовать необходимая ситуационная осведомленность, не говоря уже о достаточном количестве времени для принятия мер, если он попадет в аномальный, аварийный сценарий.
Разбирая проблему дальше, Пэн говорит, что существует пять широко признанных уровней автономности автомобилей. Все, что управляется вручную, относится к уровню 0, включая базовый круиз-контроль, который человек-оператор включает и выключает (в отличие, скажем, от кондиционера). Уровень 1 включает в себя минимальные технологии помощи водителю, такие как адаптивный круиз-контроль и удержание полосы движения. На уровне 2 параметры ускорения, торможения и рулевого управления могут быть переданы автомобилю, что позволяет ему, например, нажать на тормоз, чтобы избежать неминуемого столкновения.
Этот Уровень 2 полуавтономии сегодня является авангардом, например, с Tesla Autopilot. Два несчастных случая со смертельным исходом печально известны нарушениями безопасности, хотя статистические данные подтверждают, что использование автопилота приводит к меньшему количеству аварий, чем водители-люди на пройденные мили. В последнем наборе данных (второй квартал 2019 года) Tesla сообщила об одной аварии на каждые 3,27 миллиона миль (5,26 миллиона километров), пройденных с включенным автопилотом. Для автомобилей Tesla без автопилота или других активных функций безопасности этот показатель вырос до одной аварии на каждые 1,41 миллиона миль (2,27 миллиона километров) пробега. Оба метода были значительно безопаснее, чем данные Национальной администрации безопасности дорожного движения, согласно которым одна автомобильная авария приходится на каждые 49 человек.Пробег 8000 миль (801 500 км) в США.
В последнем наборе данных (второй квартал 2019 года) Tesla сообщила об одной аварии на каждые 3,27 миллиона миль (5,26 миллиона километров), пройденных с включенным автопилотом. Для автомобилей Tesla без автопилота или других активных функций безопасности этот показатель вырос до одной аварии на каждые 1,41 миллиона миль (2,27 миллиона километров) пробега. Оба метода были значительно безопаснее, чем данные Национальной администрации безопасности дорожного движения, согласно которым одна автомобильная авария приходится на каждые 49 человек.Пробег 8000 миль (801 500 км) в США.
По словам Пэна, события могут развиваться в неправильном направлении, так это на уровне условной автономии 3. Автомобили уровня 3 сами справляются со всеми аспектами вождения в определенных условиях эксплуатации, но ожидают, что водитель будет оставаться бдительным и полностью вовлеченным во время работы (на всякий случай). По словам Пэна, самолеты уже достигли уровня, эквивалентного 3, с Boeing 737 MAX 8, четвертым поколением 737, представленным в 2017 году. Две катастрофы со смертельным исходом — рейс 610 Lion Air в 2018 году и рейс 302 Ethiopian Airlines в 2019 году.— были связаны с ошибочным срабатыванием системы предотвращения сваливания MCAS, сокращенно от Maneuvering Characters Augmentation System. Программное обеспечение автоматически опускает нос самолета, если возникает риск сваливания, в зависимости от датчиков скорости, высоты и угла атаки. Пилоты не знали, как отключить MCAS после того, как она захватила управление, и продолжали направлять нос вниз, пока самолет не разбился. Парк MAX остается на земле, поскольку ищутся исправления программного обеспечения и устанавливаются более совершенные процедуры обучения.
Две катастрофы со смертельным исходом — рейс 610 Lion Air в 2018 году и рейс 302 Ethiopian Airlines в 2019 году.— были связаны с ошибочным срабатыванием системы предотвращения сваливания MCAS, сокращенно от Maneuvering Characters Augmentation System. Программное обеспечение автоматически опускает нос самолета, если возникает риск сваливания, в зависимости от датчиков скорости, высоты и угла атаки. Пилоты не знали, как отключить MCAS после того, как она захватила управление, и продолжали направлять нос вниз, пока самолет не разбился. Парк MAX остается на земле, поскольку ищутся исправления программного обеспечения и устанавливаются более совершенные процедуры обучения.
«Вариант уровня 3 — не лучшая идея, — говорит Пэн. Он считает, что автомобильные компании, как и производители самолетов, должны полностью развить автономию 4-го уровня без вмешательства человека на протяжении всего пути, прежде чем автономия станет править дорогами и небом. «Компании должны предлагать уровень 1, уровень 2, а затем бум, уровень 4», — добавляет Пэн.
Конечно, все технологические разработки не будут иметь значения, если нельзя заслужить доверие людей-операторов. Людям придется поверить в машину, чтобы отпустить руль и палку; на пятом уровне, высшем уровне автономии, эти элементы управления, взаимодействующие с человеком, больше не будут существовать, а транспортные средства будут больше похожи на мобильные гостиные.
Как разработчики автономных транспортных средств узнают, что то, что они сделали, на самом деле «достаточно» безопасно? Стошек предлагает руководящий принцип.
«В начале своей карьеры я спросил одного очень опытного инженера, который фактически отвечал за проектирование систем безопасности: «Как узнать, что система безопасна»? И ответ был: «Когда я поставлю на него своих детей и свою семью», — говорит Стошек. «Я действительно, действительно держал это в уме».
Похожие темы
Интеллектуальные автономные системыОб Адаме Хадхази
Адам пишет об астрофизике и технологиях. Его работы публиковались в журналах Discover и New Scientist.
Его работы публиковались в журналах Discover и New Scientist.
Большая разница в том, что это трехмерная проблема, [полет] в десять раз быстрее, чем автомобили, и вы не можете остановиться, если что-то пойдет не так.
Arne Stoschek, A3 от Airbus
Водители-люди извлекают выгоду из визуальных сигналов от пешеходов и других водителей, что должны учитывать разработчики автономных транспортных средств, такие как Ford из Пенсильвании Argo AI. Кредит: Арго ИИ
Демонстрационный образец CityAirbus предназначен для автономных полетов в городах, но Airbus заявляет, что человек будет пилотировать самолет до тех пор, пока он не будет сертифицирован и общественность не одобрит использование автономных самолетов. Предоставлено: Airbus
Беспилотный шаттл перевозит пассажиров в исследовательском кампусе Мичиганского университета. В рамках проекта изучалось, как пассажиры, водители других транспортных средств и пешеходы взаимодействовали с шаттлом. Предоставлено: Мичиганский университет
Предоставлено: Мичиганский университет
Лидарный датчик беспилотного шаттла отображает окружающую среду вокруг автомобиля. Предоставлено: Мичиганский университет 9.0008
Autonomous Pixels — Microsoft Research
Бесшовно интегрированные дисплеи вокруг нас
Исследовательский проект Autonomous Pixel Displays представляет новую архитектуру экрана, которая устраняет хрупкую топологию сетки и плоскую прямоугольную форму современных цифровых дисплеев. Вместо этого каждый пиксель имеет свои собственные встроенные возможности восприятия и обработки сигналов и действует с определенным уровнем независимости. Этот новый подход к работе с пикселями поддерживает новые форм-факторы дисплеев и варианты использования.
Последние достижения в производственных процессах позволяют изготавливать эти дисплеи из тонких и гибких компонентов, что облегчает крупномасштабное и экономичное производство рулонных материалов. Это позволяет нам думать о дисплее как о материале, а не о жестком прямоугольном объекте, физические свойства которого можно настраивать новыми и интересными способами.
Это видео является частью концепции, частью существующей технологии и представляет концепцию автономных пиксельных дисплеев. В нем представлены наши первые прототипы и визуализированы будущие приложения и свойства материалов.
Включение дисплеев в качестве материалов
Без ограничений строгой компоновки пикселей дисплеи Autonomous Pixel можно разрезать, складывать или придавать им любую форму. Это позволяет создавать процессы, которые больше похожи на манипулирование физическими материалами, такими как ткань или пластик.
Потенциальные будущие приложения
В качестве материала дисплеи Autonomous Pixel могут изменить наш нынешний подход к дизайну цифровых экранов, позволяя использовать их во множестве приложений и в различных отраслях.
Преобразование моды
Не ограничиваясь плоскими и жесткими прямоугольниками, дисплеи Autonomous Pixel можно комбинировать с другими материалами, включая текстиль, для создания конфигурируемой одежды. Они предлагают творческое и перформативное использование, которое открывает новые способы выразительности для индустрии моды, изменяя наши представления о том, что мы носим.
Они предлагают творческое и перформативное использование, которое открывает новые способы выразительности для индустрии моды, изменяя наши представления о том, что мы носим.
Следующее видео, созданное в сотрудничестве с Рианнон Уэйкфилд и Оксаной Анилионите из Королевского колледжа искусств, иллюстрирует наше видение создания дисплеев, которые формируются вокруг нас и наших потребностей и адаптируются к окружающей среде.
Это видео представляет собой творческое исследование будущего автономных пиксельных дисплеев.
Бесшовные крупномасштабные архитектурные пространства
Бесшовное масштабирование дисплеев Autonomous Pixel от одного пикселя до крупномасштабных приложений позволяет создавать интерактивные поверхности произвольной формы, которые могут заполнять и покрывать архитектурные пространства, преобразовывая здания, которые мы занимаем, и способствуя более гармоничному внедрению цифровых данных в нашу среду.
Следующее видео, созданное в сотрудничестве с buildersclub и галереей ROCA в Лондоне, иллюстрирует наше видение создания дисплеев, которые легко интегрируются в нашу среду и предоставляют локализованную информацию.
Это видео представляет собой творческое исследование будущего автономных пиксельных дисплеев.
Предлагая совершенно новые возможности для дизайна продуктов и взаимодействия, дисплеи Autonomous Pixel никоим образом не ограничиваются модой или архитектурой, а могут охватывать широкий спектр отраслей и областей применения, включая, помимо прочего: дизайн интерьера, здравоохранение и эргономичные носимые устройства, транспорт или экологический графический дизайн.
Новый взгляд на архитектуру дисплеев
Обычные цифровые дисплеи имеют сеточную типологию, что затрудняет создание неплоских и непрямоугольных дисплеев, которые можно сгибать, плавно комбинировать или масштабировать.
Архитектура дисплея Autonomous Pixels отличается от топологии сетки. Вместо этого пиксели независимо друг от друга отвечают за восприятие сигнала, обработку этого сигнала и использование этой информации для управления дисплеем. Единственные электрические соединения с пикселями осуществляются через проводящие плоскости, которые передают питание и один или два глобальных сигнала, разделяемых на все пиксели.
Используя проводящие плоскости вместо специальной сетки проводов, становится возможным вырезать или формировать части дисплея для поддержки различных неплоских приложений. Это также снимает ограничение на расположение пикселей в прямоугольной сетке. Вместо этого они могут иметь разную форму, произвольное положение и различаться по плотности. Поскольку операционная схема является локальной для каждого пикселя, нет необходимости взаимодействовать с внешней управляющей электроникой. Это делает дисплей плавно масштабируемым.
Прототипы: датчики света и EPD
Чтобы продемонстрировать жизнеспособность архитектуры Autonomous Pixel, мы разработали два макромасштабных прототипа. Эти функциональные прототипы основаны на передней панели электрофоретического дисплея (EPD), которая ламинирована на пластиковую пленку из полиэтилентерефталата (PET).
Эти функциональные прототипы основаны на передней панели электрофоретического дисплея (EPD), которая ламинирована на пластиковую пленку из полиэтилентерефталата (PET).
В нашем первом прототипе за дисплеем установлены фотодиоды, что позволяет дисплею захватывать изображения с излучающего экрана — это немного похоже на фотокопирование без копировального аппарата. Этот дисплей состоит из автономных пикселей со светочувствительными элементами, обращенными вперед или назад. Он измеряет интенсивность света в положении каждого пикселя с помощью фотодиода. Если интенсивность выше определенного порога, активируется управляющая схема, в результате чего носитель EPD меняет цвет.
В нашем втором прототипе фотодиоды обращены вперед, смотрят сквозь материал EPD и воспринимают интенсивность света, падающего на дисплей. Этот прототип состоит из пикселей со светочувствительными элементами, обращенными сквозь поверхность дисплея. Дисплей управляется путем проецирования на него света.