
Нюансы установки газового котла в частном доме » Construction archive
17.06.2016
Многие кто живёт в частном доме, знакомы с АГВ или языком простого человека – обычным газовым котлом. И мало кто знает, что вообще означают эти три буквы. АГВ — сокращённая аббревиатура аппарата газового водонагревательного. И также это давно забытая советская торговая марка. Сейчас газовые котлы для отопления частного дома представлены в очень широком ассортименте: от недорогих малоизвестных производителей до премиальных моделей всем известных брендов.
Установка своими руками такого аппарата в доме довольно сложна, хотя вполне осуществима. Если иметь специальные знания и сертификат газовщика можно даже ряд мероприятий по монтажу сделать самому. Но всё же, лучше вызвать профессионала. У них свои тонкости при установке аппарата. К примеру, не все знают, в какое помещение нужно устанавливать котёл. И многие устанавливают его в жилых комнатах. Тем, нарушая нормы безопасности и прочие правила, предусмотренные законодательством.
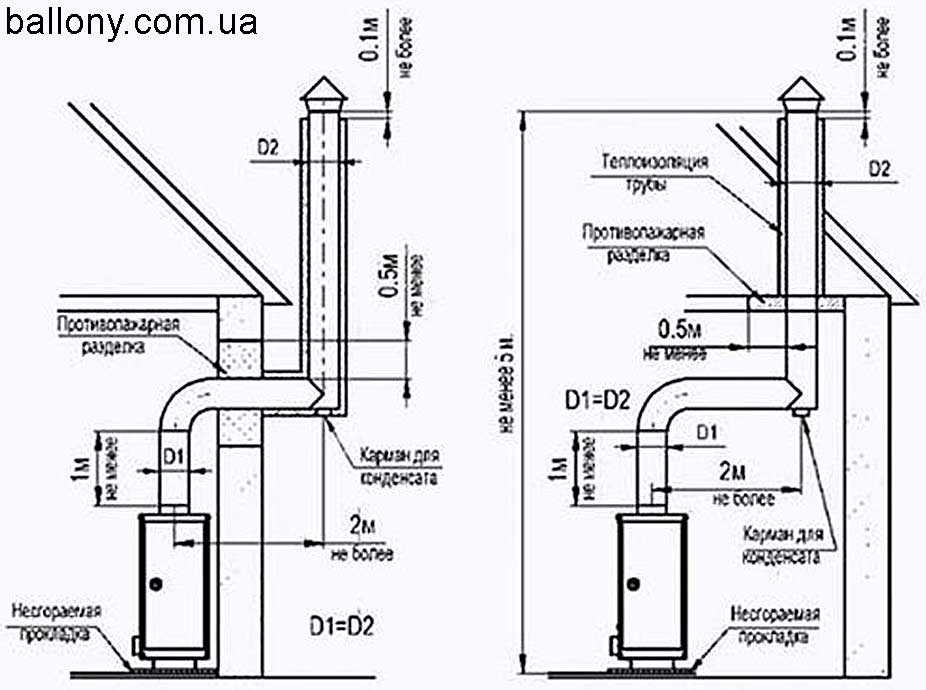
В установке котла есть свои нюансы. Помещение для него должно быть отдельным и желательно звукоизоляционным. Размер и объём определяется мощностью аппарата. Высота не ниже трёх м. Стена помещения, особенно в частных домах должна быть из огнестойкого материала. Обязательное условие, в помещение должны быть окно и свободный вход. Также для вывода продуктов сгорания в помещение нужно провести дымоход, обшитый огнестойким материалом. В частных домах его чаще всего выводят через крышу, где он должен возвышаться над коньком на 50-60 см. При этом нужно учитывать диаметр. Он должен строго соответствовать значению, написанному в инструкции установки. Мастера рекомендуют для формирования дымохода использовать металл. Он может быть из нержавеющей или чёрной стали. Изгибов трубы дымохода тоже должно быть определённое количество. Два или три, но не больше. Труба, соединяющая газовый котёл с дымоходом должна быть 25-30 сантим.
Также нужно знать, что котлы бывают двух видов: напольные и настенные.
При установке необходимо прочистить все трубы и полости в аппарате от всякого мусора и пыли. Монтаж проводить строго от пяти сантим от стены. После как газовый котёл закреплён на специальных планках, нужно будет на трубу проводящую воду, установить фильтр. Обязательное условие, фильтр должен быть жёсткой очистки. Это позволит предупредить засор в теплообменнике. Многие профессионалы устанавливают с обеих сторон фильтра запорные элементы. Это позволяет периодически чистить или же менять фильтр без слива воды. После как будет завершён монтаж дымохода. Следует проверить тягу. Многие современные газовые аппараты имеют вентиляцию, но всё равно нужно удостовериться, что с тягой всё нормально и она не обратная.
Чтобы подключить аппарат к газопроводу, потребуется помощь мастера-газовщика. Он поможет установить вентиль подающий газ к трубопроводу и, перекрыв газ, с помощью отрезка металлической трубы, сделать подачу газа через специальный сгон. Также после как все работы завершаться, мастер-газовщик поможет вам запустить аппарат в эксплуатацию и проведёт проверку котла и его безопасность.
Установка газового котла — заказать монтаж котлов АГВ для частного дома в Киеве: цена подключения напольного
- Установка газового котла
Газовое отопление одно из самых популярных. Оно эффективно, экономично и экологично. Важной частью такой отопительной системы является газовый котел. При подключении газовых котлов отопления необходимо соблюдать правила пожарной безопасности, ТБ инструкции. Монтаж котла отопления в частном доме зависит от вида оборудования: напольное или навесное, двухконтурное или одноконтурное, с открытой или закрытой камерой горения
Оно эффективно, экономично и экологично. Важной частью такой отопительной системы является газовый котел. При подключении газовых котлов отопления необходимо соблюдать правила пожарной безопасности, ТБ инструкции. Монтаж котла отопления в частном доме зависит от вида оборудования: напольное или навесное, двухконтурное или одноконтурное, с открытой или закрытой камерой горения
Монтаж навесного котла
Газовый навесной котел устанавливается в цокольном, подвальном или любом другом бытовом помещении. Работы по монтажу проводят как минимум два мастера.
Если стена, на которую будет выполнятся установка агв, из горючих материалов, то необходима прокладка из негорючего. Для крепления применяют специальные кронштейны, входящие в комплект. После того как прибор закреплен, к нему подводится подающий и обратный трубопровод. При подключении двухконтурного, где вода нагревается для гвс, присоединяется и контур холодного водоснабжения. Устанавливается запорная арматура, фильтры, обратный клапан.
Котлы с закрытой камерой сгорания имеют электронную систему защиты, поэтому необходимо подводка электричества. В помещении, где установлено оборудование должна быть хорошая вентиляция. Оборудование подключается к дымоходу. Приборы закрытого типа к коаксиальному, открытого — только к индивидуальному. Газ подключается сотрудниками газового хозяйства.
Монтаж напольного котла
Если нужно установить котел отопления большой мощности нагрева (более 150 квт), то лучше выбирать напольное исполнение. Монтаж начинается с устройства основания для газового котла. Оборудование устанавливается ровно горизонтально. Место расположение отопительного устройства, должно обеспечивать свободный доступ к нему. В этом случае обслуживание и замена котла будет удобнее.
Затем подводится к котлу:
- обратный и подающий трубопровод теплоносителя;
- контур холодного водоснабжения;
- клапана, запорная арматура, фильтры.
Потом он подключается к отоплению и газовой магистрали. Важно правильное соединение отопительного устройства к дымоходу. Напольный агрегат устанавливается в отдельном помещении.
Важно правильное соединение отопительного устройства к дымоходу. Напольный агрегат устанавливается в отдельном помещении.
Стоимость монтажа газового котла
| Виды работ | Ед. изм. | Цена, грн. |
| Выезд мастера | бесплатно | |
| Установка и подключение настенного газового котла до 32 кВт | шт. | от 2999 |
| Установка и подключение настенного газового котла от 32 кВт | шт. | от 4499 |
| Установка и подключение напольного газового котла от 55 кВт | шт. | от 5499 |
| Монтаж настенного котла до 32 кВт | шт. | от 1300 |
| Установка котла газового навесного турбированного мощностью до 35 кВт | шт. | от 2000 |
| Установка и подключение напольного газового котла до 55 кВт | шт. |
от 3499 |
| Монтаж напольного котла (имп.) до 20 кВт | шт. | от 1200 |
| Монтаж напольного котла (имп.) 21 – 50 кВт | шт. | от 1250 |
| Монтаж напольного одноконтурного котла (Украина) до 20 кВт | шт. | от 1200 |
| Монтаж напольного одноконтурного котла (Украина) 21 – 50 кВт | шт. | от 1200 |
| Установка котла газового одноконтурного парапетного мощностью до 35 кВт | шт. | от 2000 |
| Монтаж напольного двухконтурного котла (Украина) до 20 кВт | шт. | от 1250 |
| Монтаж напольного двухконтурного котла (Украина) 21 – 50 кВт | шт. | от 1300 |
| Монтаж базового коаксиального дымохода для котла | шт. | от 850 |
| Сборка и монтаж байпаса с насосом | шт. |
от 600 |
| Монтаж комнатного термостата | шт. | от 200 |
| Установка бойлера косвенного нагрева до 200л. | шт. | от 800 |
| Установка бойлера косвенного нагрева более 200л. | шт. | от 1400 |
| Монтаж аккумулирующей (буферной)емкости до 400л. | шт. | от 1200 |
| Монтаж аккумулирующей (буферной)емкости более 400л. | шт. | от 1600 |
| Установка и подключение насосно-смесительного узла | шт. | от 500 |
| Монтаж и подключение циркуляционного насоса | шт. | от 500 |
| Монтаж расширительного бака | шт. | от 500 |
| Установка регулятора давления | шт. | от 200 |
| Снятие заглушек и заполнение системы водой | система | от 300 |
При монтаже котла цена зависит от вида оборудования, необходимость установки насоса.
Естественная навигация Автоматизированные управляемые транспортные средства
Шаг за шагом «бесплатная» или естественная навигация входит в отрасль AGV (или Автономные мобильные роботы, AMR ).
Концепция проста, «свободная» навигация, то есть навигация без необходимости установки аппаратных средств, таких как провода, ленты, отражатели.
В этой статье я попытаюсь объяснить вам, как работают автоматизированные управляемые транспортные средства со свободной навигацией, и некоторые интересные концепции, такие как SLAM Концепция навигации ?
Открытие естественной навигации по объектам
Что такое естественная навигация для AGV?
В целом, автоматические управляемые транспортные средства с естественной навигацией способны перемещаться автономно, определяя и картографируя окружающую местность. Естественная навигация – это наиболее продвинутый метод навигации на автоматических транспортных средствах.
Естественная навигация – это наиболее продвинутый метод навигации на автоматических транспортных средствах.
Беспилотные роботы с естественной навигацией вместо того, чтобы следовать магнитной ленте на полу (или выполнять лазерную триангуляцию отражателя), они могут, например, идентифицировать определенную стену и перемещаться на заданном расстоянии от нее.
Фактически, существует несколько технологий под эгидой «естественной навигации» .
Наиболее типичная технология основана на распознавании контуров (на основе контуров) . Транспортные средства с этой технологией перемещаются, идентифицируя и картографируя окружающую местность с помощью различных типов датчиков, используемых мобильными роботами.
Важно понимать, что самоуправляемые роботы, выполняющие естественную навигацию, называются автономными мобильными роботами (AMR), а не автоматизированными управляемыми транспортными средствами.
Кстати, не пропустите мою статью о различиях между АГВС и АМРС. В противном случае вы можете зарегистрироваться и скачать этот технический документ, полный полезной информации.
| Click here to download the whitepaper |
Ok, let’s go ahead…
Table of Contents
Что такое SLAM? Что такое слэм-техника? Навигация SLAM в отрасли автоматических транспортных средств Что делает программное обеспечение SLAM для одновременной локализации и картирования? Как робот AGV отображает свое окружение? Но откуда AGV знает, где «это»? Каковы преимущества навигации AGV Natural? Какие недостатки у бесплатной навигации? Когда целесообразно выбирать AGV с естественной навигацией? |
Что такое технология на основе SLAM? Что такое техника навигации SLAM?
Термин SLAM является аббревиатурой от Одновременная локализация и сопоставление . Таким образом, AGV на основе SLAM может отображать окружающую среду и локализовать себя на этой карте.
Таким образом, AGV на основе SLAM может отображать окружающую среду и локализовать себя на этой карте.
Не волнуйтесь, я объясню, как работают роботы со слэм-навигацией.
Навигация на основе SLAM шаг за шагом входит в индустрию AGV. Фактически, я убежден, что технология SLAM рано или поздно заменит другие традиционные методы навигации, такие как навигация по магнитной ленте.
По сути, мобильный робот составляет карту окружающей среды с помощью различных типов датчиков , таких как лидары или видеокамеры, и может локализовать себя на этой карте.
Робот создает «теоретическую» карту, а затем сравнивает ее с «реальной картой», которую он «видит» во время бега.
Это отличное решение, но среда должна рассчитывать на четко определенные спецификации .
Есть хорошие поставщики навигационного программного обеспечения AGV, разрабатывающего и продающего Natural Navigation Technologies . Производитель AGV может покупать у поставщика навигационных технологий или разрабатывать собственные навигационные технологии.
Производитель AGV может покупать у поставщика навигационных технологий или разрабатывать собственные навигационные технологии.
Есть два ключевых момента, которые необходимо преодолеть, прежде чем мы увидим SLAM повсюду:
- Свободная навигация может быть затруднена в хаотичной и изменчивой среде. Робот должен иметь возможность «видеть» хороший процент окружающей среды, иначе он не будет знать, где он находится.
- Даже если есть какое-то бесплатное или недорогое программное обеспечение SLAM, хорошее навигационное программное обеспечение SLAM стоит дороже, чем другие традиционные методы навигации .
В этих вкладках вы можете найти некоторых из наиболее важных поставщиков навигационного программного обеспечения AGV для индустрии мобильных роботов… не стесняйтесь и свяжитесь с ними для получения дополнительной информации.
- КОЛЛМОРГЕН
- ВИДЕО
KOLLMORGEN
Kollmorgen NDC8 работает со всеми известными навигационными технологиями.
 Есть поддержка комбинации технологий, так называемая мультинавигация, что хорошо, если вы хотите обслуживать складское пространство с помощью одного типа навигации, а производственную зону с помощью другого.
Есть поддержка комбинации технологий, так называемая мультинавигация, что хорошо, если вы хотите обслуживать складское пространство с помощью одного типа навигации, а производственную зону с помощью другого.- инкубированный IT
- ВИДЕО
инкубированный IT
incubed IT — сложное аппаратно-независимое программное обеспечение для навигации и управления парком (FMS) для автономных мобильных роботов (AMR)
- BLUEBOTICS
- ВИДЕО
BLUEBOTICS
Мы предоставляем технологии ANT ® , естественную навигацию , и экспертную поддержку, необходимую компаниям для успешного вывода на рынок своих автоматических транспортных средств, автоматических вилочных погрузчиков или мобильных роботов.
- НАВИТЕК
- О
NAVITEC
Navitec Systems предлагает передовые навигационные продукты, основанные на естественных характеристиках, применимые к большинству транспортных средств, от миниатюрных внутренних автоматических транспортных средств до самых больших мобильных машин.

Что делает программное обеспечение SLAM для одновременной локализации и картирования?
SLAM в основном состоит из:
- Первое, что нужно сделать, это «отобразить» среду для создания «теоретической карты», которая хранится в «мозге» робота или системы управления.
- Когда робот заработает, он выполняет «Извлечение ориентира» . Робот перемещается и отображает «реальную» среду или контур.
- Связь данных. Данные, полученные при навигации, сравниваются с «теоретическими» условиями, ранее записанными на первом этапе.
- Оценка состояния . Самоуправляемый робот оценивает, где он основан на полученных «реальных данных» по сравнению с сохраненными «теоретическими данными». Эта информация дополняется другими данными, поступающими от других IMU (инерциальных измерительных блоков) таких энкодеров и т.
 д. Состояние и карта пересчитываются с учетом старых и новых данных.
д. Состояние и карта пересчитываются с учетом старых и новых данных.
Все эти расчеты задаются сложными алгоритмами, которые могут варьироваться в зависимости от разработчика. Кроме того, результаты зависят от инструментов и инструментов, используемых для сбора данных.
По этой причине SLAM — это скорее «концепция» , чем отдельный алгоритм или метод.
Как беспилотный робот SLAM отображает свое окружение?
Существует несколько методов и датчиков для картирования или отслеживания окружающей среды и оценки положения мобильного робота. Каждый производитель использует один или комбинацию из следующих.
Датчики LiDAR
Датчики LiDAR широко используются в индустрии мобильных роботов. Сканер LiDAR измеряет расстояние до цели, освещая цель лазерным светом и измеряя отраженный свет датчиком.
Различия во времени возврата лазера и длинах волн могут быть использованы для создания цифровых 2-D или 3-D изображений цели.
Термин LiDAR является аббревиатурой от Light Detection and Ranging |
LiDAR излучает лазерные лучи во время движения, а возвращаемая информация используется для картирования окружающей среды и определения положения AGV.
Существует несколько типов датчиков LiDAR, сканирующих лидаров, твердотельных лидаров и т. д.
Если вы хотите узнать больше о датчиках и технологиях LiDAR, вы не можете пропустить этот веб-семинар: Последние тенденции в лидарах для мобильных устройств Приложения для роботов от SICK.
| Нажмите здесь, чтобы посмотреть вебинар |
Sonar
AGVS также используйте Sonars для навигации. Гидролокаторы устарели по сравнению с технологией LiDAR, но они дешевле. Их измерения хуже, чем у лазерных сканеров.
Навигация с визуальным управлением для транспортных средств с визуальным управлением (VGV)
Vision Guided Транспортные средства часто используют стереосистемы или триклопы для измерения расстояний. Использование зрения напоминает то, как люди смотрят на мир, и, таким образом, может быть более привлекательным интуитивно, чем лазер или сонар. Также на картинке намного больше информации по сравнению с лазером и сонаром.
Основная проблема заключается в том, что технологии зрения предоставляют огромное количество ценной информации, которую трудно обрабатывать, требуя сложных и продвинутых алгоритмов. Конечно, технологии и вычислительные мощности совершенствуются, поэтому технология Vision Guided становится проще, надежнее и доступнее.
Но как мобильный робот узнает, где «это»?
Существует три основных стратегии «сопоставления» информации.
Первая стратегия: сканирование за сканированием
Данные, полученные от датчиков (например, LiDAR), используются для оценки положения AGV между двумя последовательными сканированиями.
В результате мы обновили и накопили позиционирование автомобиля.
Этот метод не зависит от какой-либо предопределенной карты, поэтому он очень полезен, когда карта отсутствует или для создания исходной карты.
Основная проблема в том, что ошибка со временем увеличивается без возможности ее исправить.
Вторая стратегия: сопоставление сканирования и карты
Система управления или в мозгу робота. 9. Например, в хаотичной производственной среде.
Третья стратегия: Комбинация с одометрией
Ни одна из этих стратегий не является полностью удовлетворительной и надежной, поэтому возникает третья стратегия: Комбинация сканирования в сканирование, сканирования в карту и инерциальных и одометрических данных робота для преодоления проблем и обеспечения точной и надежной работы в реальных условиях и приложениях.
Важным аспектом SLAM является сочетание с данными одометрии (ускорение, кодировщики колес, гироскоп и т. д.). Цель данных одометрии — предоставить приблизительное положение робота, запрашивая его внутренние датчики одометрии.
Робот с автономным управлением смешивает всю информацию, полученную от измеряемой среды, теоретической среды и собственных датчиков, чтобы обеспечить максимально точное позиционирование.
Каковы преимущества естественной навигации для AGV? |
|
Каковы недостатки естественной навигации для AGV? |
|
 Установка выполняется быстро, поэтому вам потребуется немного времени для установки системы. Это означает более низкую стоимость рабочей силы.
Установка выполняется быстро, поэтому вам потребуется немного времени для установки системы. Это означает более низкую стоимость рабочей силы.
Когда целесообразно выбирать AGV с естественной навигацией?
По моему мнению, Natural Navigation заменит другие типы навигации, такие как магнитная навигация, оптическая навигация и т. д. Основные производители AGV и AMR разрабатывают и внедряют эту технологию в свои роботы.
Главная забота сегодня о Природных технологиях его надежность в переменных средах таких производственных линий, где происходит постоянное движение людей, обслуживаемых средств, ящиков, поддонов и т. д. В этих условиях мобильный робот с естественной навигацией может не найти свое местонахождение, потому что контуры постоянно меняются.
По этой причине Natural Naviagtion является отличным решением для мобильных роботов , когда у вас есть четко определенные профили и среды с фиксированными структурами, такими как стены, колонны.
Натуральная навигация является лучшим решением для применений, таких как:
|
В общем, в любой среде с низким уровнем «путаницы».
Если вы хотите узнать подробные технические подробности о технологии SLAM, перейдите по этой ссылке.
Статьи по теме… чтобы узнать больше о Natural Navigation Поставщики программного обеспечения для навигации AGV с видео, кто внедряет инновации в навигационной отрасли?
Методы навигации AGV: типы, сравнение, плюсы и минусы — иллюстрированное руководство
AGV и AMR: Что следует купить? Различия? За и против? — Победитель?
Основные области применения автономных мобильных роботов |
Автор Альфредо Пастор Телла (редактор agvnetwork).
Следуйте за мной в LinkedIn… давайте создадим сообщество мобильных роботов, чтобы обсудить и узнать об этих выдающихся системах.
Автоматизированные управляемые транспортные средства (AGV) Значение и типы
Иногда называемые самоуправляемыми транспортными средствами или автономными управляемыми транспортными средствами, автоматизированные управляемые транспортные средства (AGV) представляют собой системы погрузочно-разгрузочных работ или грузовые транспортеры, которые автономно перемещаются по складу, распределительному центру или производственное предприятие, без бортового оператора или водителя. В этом посте мы рассмотрим различные типы AGV, их значение, принципы работы и их преимущества.
Применение для AGV
Автоматизированные транспортные системы используются для задач, которые обычно выполняются с помощью вилочных погрузчиков, конвейерных систем или ручных тележек, перемещающих большие объемы материала повторяющимся образом.
AGV используются в различных областях. Они часто используются для транспортировки сырья, такого как металл, пластик, резина или бумага. Например, AGV могут перевозить сырье от приемки до склада или доставлять материалы непосредственно на производственные линии. AGV последовательно и надежно доставляют необходимое сырье без вмешательства человека, гарантируя, что производственные линии всегда будут иметь необходимые материалы без перерыва.
Помимо транспортировки сырья, AGV используются в незавершенном производстве и с готовой продукцией для поддержки производства или производственных линий. Согласно Investopedia, термин незавершенное производство описывает «частично завершенные товары, которые обычно превращаются из сырья в готовый продукт за короткий период времени», например промышленные товары. В приложениях, работающих в процессе, AGV перемещают материалы или детали со склада на производственные линии или с одной рабочей станции на другую, обеспечивая повторяющееся и эффективное перемещение материалов на протяжении всего производственного процесса. Без AGV производственные процессы могут остановиться, когда на технологических линиях закончатся материалы. Затем производство откладывается, пока рабочий извлекает необходимые материалы со склада и транспортирует их на производственную линию.
Без AGV производственные процессы могут остановиться, когда на технологических линиях закончатся материалы. Затем производство откладывается, пока рабочий извлекает необходимые материалы со склада и транспортирует их на производственную линию.
AGV также используются для входящей и исходящей обработки для пополнения запасов и комплектования. Например, AGV можно использовать для транспортировки запасов от мест получения к местам хранения или от мест долгосрочного хранения к местам комплектации для пополнения запасов. Перемещение запасов с долговременного хранения в места предварительной комплектации гарантирует, что соответствующие запасы будут доступны сборщикам, что сделает процесс комплектования заказов более эффективным. AGV, такие как коллаборативные мобильные роботы, помогают в процессе комплектования, помогая сотрудникам склада выполнять задачи и транспортируя собранные заказы на рабочие станции по упаковке и отгрузке.
Типы автоматически управляемых транспортных средств
Существует несколько типов автоматизированных управляемых транспортных средств. Многие AGV похожи на другие транспортные средства, управляемые человеком, но предназначены для работы без прямого вмешательства или руководства человека.
Многие AGV похожи на другие транспортные средства, управляемые человеком, но предназначены для работы без прямого вмешательства или руководства человека.
Тележки с автоматическим управлением
Тележка с автоматическим управлением (AGC) — это самый простой тип AGV с минимальным набором функций. Навигационные системы могут варьироваться от таких простых систем, как магнитная лента, до сложных навигационных систем на основе датчиков, которые используют ИИ для навигации по окружающей среде. Они могут перевозить различные материалы, от мелких деталей до загруженных поддонов, и часто используются для сортировки, хранения и перегрузки.
Одним из примеров AGC является автоматизированный транспортер больничной тележки, используемый для эффективной транспортировки компактных грузов по больнице, таких как еда и пустые подносы для еды, чистое или грязное постельное белье, биологически опасные отходы или стерильные материалы. Автоматические транспортеры больничных тележек могут помочь сократить трудозатраты без необходимости в том, чтобы сотрудник вручную передвигал тележку с места на место.
Вилочные погрузчики AGV
Вилочные погрузчики или вилочные погрузчики с автоматическим управлением являются еще одним широко используемым типом AGV. Они предназначены для выполнения тех же функций, что и вилочный погрузчик, управляемый человеком (перевозка поддонов), но без участия человека-оператора.
Буксировка AGV
Буксирующие транспортные средства или буксирующие транспортные средства с автоматическим управлением тянут за собой один или несколько грузовых транспортных средств без двигателя в виде поезда. Иногда называемые беспилотными поездами, механические тягачи передвигаются на колесах. Буксировщики с автоматическим управлением часто используются для перевозки тяжелых грузов на большие расстояния. У них может быть несколько остановок высадки и посадки на определенном пути через склад или фабрику.
Манипуляторы единичной загрузки
Обработчики единичных грузов перевозят дискретные грузы, такие как отдельные предметы, или отдельные единицы, такие как поддоны или контейнеры, содержащие несколько предметов.
Транспортеры для перевозки тяжелых грузов
Для перевозки самых тяжелых грузов перевозчики тяжелых грузов представляют собой тип AGV, используемый в таких приложениях, как крупногабаритная сборка, литье и транспортировка рулонов и листов. Некоторые перевозчики тяжелого груза имеют возможности самозагрузки и могут иметь стандартное, поворотное или всенаправленное рулевое управление.
Автономные мобильные роботы
Автономные мобильные роботы (AMR), как правило, более технологически продвинуты, чем другие типы AGV. В то время как многие AGV используют стационарные навигационные системы, такие как провода или магнитная лента, многие AMR оснащены интеллектуальными навигационными возможностями, такими как датчики и системы камер, которые позволяют им обнаруживать препятствия и объезжать их. Благодаря более сложной технологии AMR могут динамически перемещаться по складу или другому объекту и планировать наиболее эффективные маршруты.
Принцип работы AGV
AGV — это самоходные транспортные средства, движение которых управляется программным обеспечением и датчиками. Большинство AGV перемещаются по определенным маршрутам, но, как уже упоминалось, AMR обычно имеют более продвинутую технологию с возможностями динамической навигации.
Большинство AGV перемещаются по определенным маршрутам, но, как уже упоминалось, AMR обычно имеют более продвинутую технологию с возможностями динамической навигации.
Навигация AGV
Навигация AGV может управляться с помощью одного или нескольких из следующих механизмов:
- Магнитная направляющая лента — некоторые AGV имеют магнитные датчики и следуют по маршруту с помощью магнитной ленты.
- Проводная навигация — некоторые AGV следуют проводным путям, встроенным в пол объекта. Провод передает сигнал, который AGV обнаруживает через антенну или датчик.
- Лазерная целеуказание — при этом методе светоотражающая лента крепится на такие объекты, как стены, стационарные машины и столбы. AGV оснащены лазерным передатчиком и приемником. Лазеры отражаются от ленты в пределах прямой видимости и используются для расчета угла объекта и расстояния от AGV.
- Инерциальная (гироскопическая) навигация — некоторые AGV управляются компьютерной системой с помощью транспондеров, встроенных в пол объекта, чтобы убедиться, что AGV находится на правильном курсе.

- Наведение с визуальным наведением — никаких изменений в инфраструктуре для AGV с визуальным наведением не требуется. Камеры записывают особенности вдоль маршрута, и AGV полагаются на эти записанные особенности для навигации.
- Геонавигация — как и для AGV с визуальным наведением, для AGV, использующих геонаведение, не требуется никаких модификаций инфраструктуры. AGV с геонаведением распознают объекты в своей среде, чтобы определить их местоположение в режиме реального времени для навигации по объекту.
- LiDAR — LiDAR (Light Detection and Ranging) — это сложная навигационная технология, в которой используются датчики, передающие лазерные импульсы для измерения расстояния между роботом и объектами в его окружении. Эти данные компилируются для создания 360-градусной карты окружающей среды, позволяющей роботам перемещаться по объекту и избегать препятствий без необходимости в какой-либо дополнительной инфраструктуре. 6 River Systems использует навигационную технологию LiDAR, чтобы позволить своим AGV перемещаться по складу, не требуя изменений в инфраструктуре, а также адаптироваться к новым условиям в случае изменения планировки складского этажа.

Рулевое управление AGV
Рулевое управление AGV управляется дифференциальным управлением скоростью, управлением рулевым колесом или их комбинацией:
- Дифференциальное управление скоростью — это наиболее распространенный тип рулевого управления, используемый AGV. Дифференциальное управление скоростью использует два независимых ведущих колеса. Каждое ведущее колесо вращается с разной скоростью. Чтобы двигаться вперед или назад, два привода работают с одинаковой скоростью. Самый простой вариант рулевого управления для AGV, управление дифференциальной скоростью не требует дополнительных рулевых двигателей или механизмов. Он обычно используется для AGV, которые работают в ограниченном пространстве или для тех, которые работают рядом с машинами. Он не используется для буксировки, так как при повороте прицеп может перевернуться.
- Рулевое управление — этот тип рулевого управления похож на рулевое управление легкового или грузового автомобиля. При управлении управляемым колесом ведущее колесо является поворотным.
 Управление рулевым колесом более точное, чем дифференциальное управление скоростью, и обеспечивает более плавный поворот. Он часто используется для буксировки, а также может управляться оператором.
Управление рулевым колесом более точное, чем дифференциальное управление скоростью, и обеспечивает более плавный поворот. Он часто используется для буксировки, а также может управляться оператором. - Комбинированное рулевое управление — это комбинация дифференциального управления скоростью и управляемого колеса. AGV, использующие комбинированное рулевое управление, имеют два независимых рулевых / приводных двигателя на диагональных углах AGV и поворотные ролики на двух других углах. AGV, использующие комбинированное рулевое управление, могут поворачивать в любом направлении, как автомобиль, а также двигаться в режиме дифференциального рулевого управления в любом направлении.
Управление дорожным движением AGV
Меры по управлению дорожным движением включают зональное управление, предотвращение столкновений или сочетание того и другого:
- Зональное управление — Простое в установке и расширении зональное управление является широко используемым методом управления дорожным движением для AGV.
 Беспроводной передатчик передает сигналы в определенных областях, а AGV содержит датчик, который принимает сигнал и передает его обратно на передатчик. Если зона свободна, посылается сигнал «чисто», который позволяет AGV войти в зону или пройти через нее. Если другой AGV находится в этом районе, посылается сигнал «стоп», который предупреждает другие AGV, пытающиеся войти, о том, что область не свободна. В этом случае ожидающие AGV остановятся и будут ждать, пока первый AGV не выйдет из зоны и передатчик не пошлет сигнал «очистки». Еще один способ контроля зоны — оборудовать каждый AGV собственным передатчиком, позволяющим посылать сигнал «не входить» другим AGV, приближающимся к зоне.
Беспроводной передатчик передает сигналы в определенных областях, а AGV содержит датчик, который принимает сигнал и передает его обратно на передатчик. Если зона свободна, посылается сигнал «чисто», который позволяет AGV войти в зону или пройти через нее. Если другой AGV находится в этом районе, посылается сигнал «стоп», который предупреждает другие AGV, пытающиеся войти, о том, что область не свободна. В этом случае ожидающие AGV остановятся и будут ждать, пока первый AGV не выйдет из зоны и передатчик не пошлет сигнал «очистки». Еще один способ контроля зоны — оборудовать каждый AGV собственным передатчиком, позволяющим посылать сигнал «не входить» другим AGV, приближающимся к зоне. - Предотвращение столкновений — AGV, использующие управление зоной предотвращения столкновений, оснащены датчиками, которые передают сигнал и ждут ответа, чтобы определить, находится ли объект перед ним. Эти датчики могут быть звуковыми, которые работают как радар, или оптическими, которые используют инфракрасные датчики.
 Оба работают аналогичным образом. Датчики бампера — это еще один тип датчиков предотвращения столкновений. Многие AGV оснащены бамперными датчиками для обеспечения безопасности. Датчики бампера останавливаются, чтобы избежать столкновения, когда они ощущают физический контакт.
Оба работают аналогичным образом. Датчики бампера — это еще один тип датчиков предотвращения столкновений. Многие AGV оснащены бамперными датчиками для обеспечения безопасности. Датчики бампера останавливаются, чтобы избежать столкновения, когда они ощущают физический контакт. - Комбинированное управление — AGV, использующие комбинированное управление, оснащены как датчиками контроля столкновений, так и датчиками зонального контроля, чтобы обеспечить более надежное предотвращение столкновений в любых ситуациях. Например, AGV может использовать зональный контроль в качестве основной системы управления дорожным движением, но также иметь датчики предотвращения столкновений в качестве резерва на случай неисправности системы зонального контроля.
Преимущества AGV
AGV предлагают многочисленные преимущества при складировании и производстве.
Повышение эффективности и производительности
Поскольку они работают автономно, AGV повышают эффективность и производительность, а также предсказуемы и надежны для повторяющихся задач. AGV устраняют ненужные прогулки, а также устраняют физический труд по транспортировке материалов. Они также задают темп для рабочих, не давая коллегам выполнять задачу. AGV, такие как совместные мобильные роботы, помогают сотрудникам выполнять каждую задачу, уменьшая количество человеческих ошибок, что помогает повысить точность комплектования заказов и свести к минимуму потери и неуместные продукты. Используя искусственный интеллект для оптимизации маршрутов и определения приоритетов в работе, коллаборативные мобильные роботы улучшают использование ресурсов.
AGV устраняют ненужные прогулки, а также устраняют физический труд по транспортировке материалов. Они также задают темп для рабочих, не давая коллегам выполнять задачу. AGV, такие как совместные мобильные роботы, помогают сотрудникам выполнять каждую задачу, уменьшая количество человеческих ошибок, что помогает повысить точность комплектования заказов и свести к минимуму потери и неуместные продукты. Используя искусственный интеллект для оптимизации маршрутов и определения приоритетов в работе, коллаборативные мобильные роботы улучшают использование ресурсов.
Постоянные затраты
AGV обычно приобретаются из расчета за единицу или за период аренды, поэтому колебания затрат меньше по сравнению с человеческим трудом, который может колебаться в зависимости от рыночных условий и спроса.
Гибкость
Некоторые AGV обеспечивают гибкость легкого изменения маршрута (по сравнению с другими, которые требуют изменения маршрута направляющих проводов или другой инфраструктуры для корректировки маршрута транспортного средства). Автоматизированные управляемые транспортные средства также являются масштабируемым решением с возможностью добавления дополнительных единиц в зависимости от спроса.
Автоматизированные управляемые транспортные средства также являются масштабируемым решением с возможностью добавления дополнительных единиц в зависимости от спроса.
Требуется меньше места
По сравнению с другими решениями по автоматизации, такими как конвейерные системы, AGV требуют меньше места. Некоторые AGV меньше по сравнению с традиционным складским оборудованием, таким как вилочные погрузчики, что позволяет использовать планировку этажей с более узкими проходами и лучшим использованием пространства.
Повышенная безопасность
Наконец, AGV — это безопасное решение для автоматизации складов, распределительных центров и производственных предприятий. AGV оснащены датчиками для предотвращения столкновений. Усовершенствованные AGV, такие как AMR, имеют интеллектуальные возможности маршрутизации, которые позволяют им планировать наиболее эффективный маршрут через склад или объект, снижая загруженность проходов и предотвращая травмы.
Автоматизированные транспортные средства специально разработаны для автоматизации задач, для которых не требуется участие человека.